
Publications
F. Che, B. Chan*, C. Ma and A. R. Mahmood “AVG-DICE: Stationary Distribution Correction by Regression,” in Reinforcement Learning Conference (RLC) 2025.
Paper | Code
B. Chan*, X. Chen*, A. György, and D. Schuurmans, “Toward Understanding In-context vs. In-weight Learning,” in the Thirteenth International Conference on Learning Representations (ICLR) 2025. (* equal contribution)
Paper | Code
B. Chan, A. Leung, and J. Bergstra, “Offline-to-online Reinforcement Learning for Image-based Grasping with Scarce Demonstrations,” in CoRL Workshop on Mastering Robot Manipulation in a World of Abundant Data 2024.
Paper | Code | Talk
T. Ablett, B. Chan, and J. Kelly, “Efficient Imitation Without Demonstrations via Value-Penalized Auxiliary Control from Examples,” in IEEE International Conference on Robotics and Automation (ICRA) 2025. 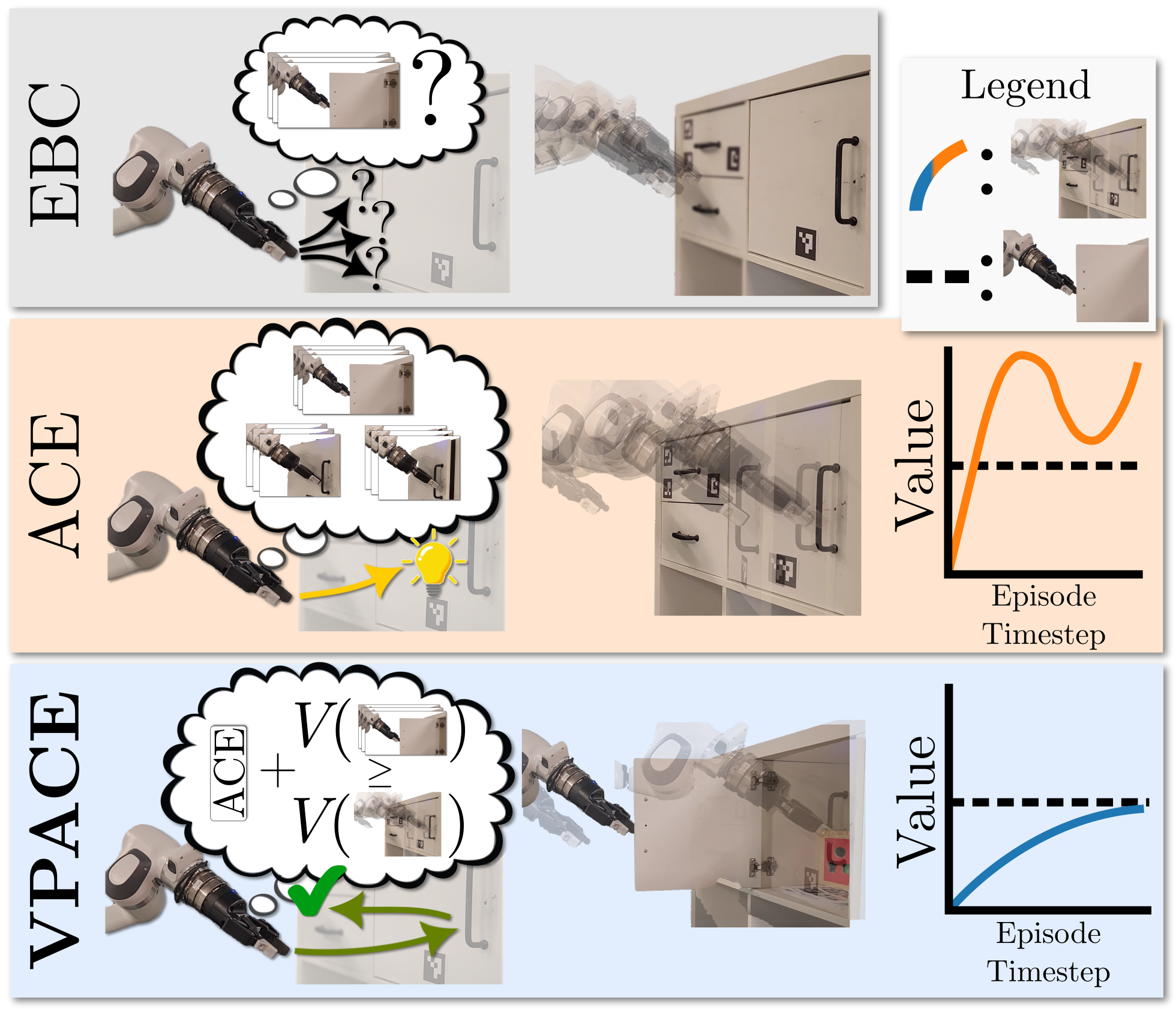
Paper | Code | Website
A. Ayoub*, D. Szepesvari*, F. Zanini*, B. Chan*, D. Gupta, D. Schuurmans, and B. C. da Silva, “Mitigating the Curse of Horizon in Monte-Carlo Returns,” in Reinforcement Learning Conference (RLC) 2024. (* equal contribution)
Paper | Code
B. Chan, K. Pereida*, and J. Bergstra*, “A Statistical Guarantee for Representation Transfer in Multitask Imitation Learning,” in NeurIPS Workshop on Robot Learning 2023. (* equal advising)
Paper | Code
T. Ablett, B. Chan, and J. Kelly, “Learning from Guided Play: Improving Exploration in Adversarial Imitation Learning with Simple Auxiliary Tasks,” in Robotics and Automation Letters (RA-L) 2023, doi: 10.1109/LRA.2023.3236882. 

Paper | Code | Website
T. Ablett*, B. Chan*, and J. Kelly, “Learning from Guided Play: A Scheduled Hierarchical Approach for Improving Exploration in Adversarial Imitation Learning,” in Thirty-fifth Conference on Neural Information Processing Systems (NeurIPS), Deep Reinforcement Learning Workshop. (* equal contribution) 
Paper | Code | Presentation | Website
O. Limoyo, B. Chan, F. Maric, B. Wagstaff, A. R. Mahmood and J. Kelly, “Heteroscedastic Uncertainty for Robust Generative Latent Dynamics,” in Robotics and Automation Letters (RA-L) 2020, doi: 10.1109/LRA.2020.3015449.

Paper | Code | Presentation
You can also find my articles on my Google Scholar profile.